图像平滑与滤波
图像平滑是指为了抑制噪声,使图像亮度趋于平缓的处理方法就是图像平滑。图像平滑可以通过各种滤波来实现,这些图像滤波都是一些简单的卷积操作。
- 均值滤波:即在一个卷积核的感受野内的平均值作为该像素点的值,opencv代码为
cv2.blur(img, (3, 3))。 - 高斯滤波:高斯滤波会根据距离取周围的像素点加权和,越近的像素权重越大。opencv代码为
cv2.GaussianBlur。由于高斯滤波对中心点权重最高,使得其对椒盐类的噪声处理效果较差。 - 中值滤波:即在一个卷积核的感受野内的中值作为该像素点的值,opencv代码为
cv2.midianBlur(img, (3, 3))。中值滤波对中心点的取值较为绝对化,故对椒盐类的噪声处理能力较强。
下面三张图分别为原图、高斯滤波结果、中值滤波结果。

图像的形态学操作
1 腐蚀与膨胀
进行膨胀(dilation)操作时,使用卷积核遍历图像,使用内核覆盖区域的最大相素值代替锚点位置的相素。这一最大化操作将会导致图像中的亮区扩大,因此名为膨胀 。腐蚀(erosion)则与膨胀相反。在OpenCV中代码如下:
1 | kernel = np.ones((3, 3), np.uint8) |

2 开运算与闭运算
开运算指的是先腐蚀后膨胀的操作,闭运算则是先膨胀后腐蚀的操作。通常用于消除噪点、沟壑,平滑物体轮廓。在OpenCV中代码如下所示:
1 | cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel) # 开运算 |
3 梯度计算
使用膨胀的结果减去腐蚀的结果可以计算得到图像的梯度,但OpenCV中提供了更便捷的操作:cv2.morphologyEx(img, cv2.MORPH_GRADIENT, kernel)。
Sobel算子
Sobel算子是计算机视觉领域的一种重要处理方法。主要用于获得数字图像的一阶梯度,常用于边缘检测(注意与轮廓检测相区分)。Sobel算子是把图像中每个像素的上下左右四领域的灰度值加权差,在边缘处达到极值从而检测边缘。
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的差值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像,其公式如下:

在OpenCV中,可通过cv2.Sobel(src, ddepth, dx, dy, ksize)调用Sobel算子。具体操作:
1 | img = cv2.imread('pic.png', cv2.IMREAD_GRAYSCALE) # 读取灰度图 |
求得的结果如下所示,其中左边是原图,右边是边缘检测结果:
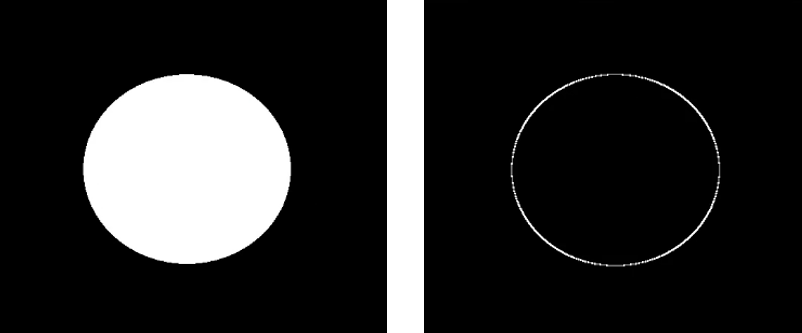
因为直接求两个方向的梯度效果较差,所以此处是对两个方向分别求梯度再加权平均,而不是直接求两个方向的梯度。
Canny边缘检测
Canny边缘检测算法是对图像进行的一系列用于边缘检测的操作步骤:
- 使用高斯滤波器对图像进行平滑处理,滤除噪声;
- 计算图像中每个像素点的梯度强度和方向;
- 使用非极大值抑制消除边缘检测带来的杂散效应;
- 应用双阈值检测找出潜在的边缘,抑制孤立弱边缘。

OpenCV:cv2.Canny(img, min_threshold, max_threshold)